bunraku
Bunraku* is an ongoing project exploring robot control, real-time simulation, and collaborative interaction in creative and artistic contexts. A visual live programming tool, developed for artists, designers, and creative coders, it provides an experimental space for working with robotic movement outside of purely industrial applications.
Rather than treating robots as rigid tools for automation, Bunraku approaches them as dynamic, responsive, and performative entities. The framework allows for live interaction, networked collaboration, and alternative input methods, making it particularly suited for multimedia installations, performances, and research into non-utilitarian robotics.
*Bunraku (pronounced boon-rah-koo) is a form of traditional Japanese puppet theatre that dates back to the 17th century. It is known for its highly intricate puppets, which are operated by multiple puppeteers working together to create fluid, lifelike movements. The performances often feature synchronized storytelling, combining narration, music, and precise puppet manipulation.
Technical Foundations
Bunraku is deeply rooted in existing robotic and creative coding ecosystems:
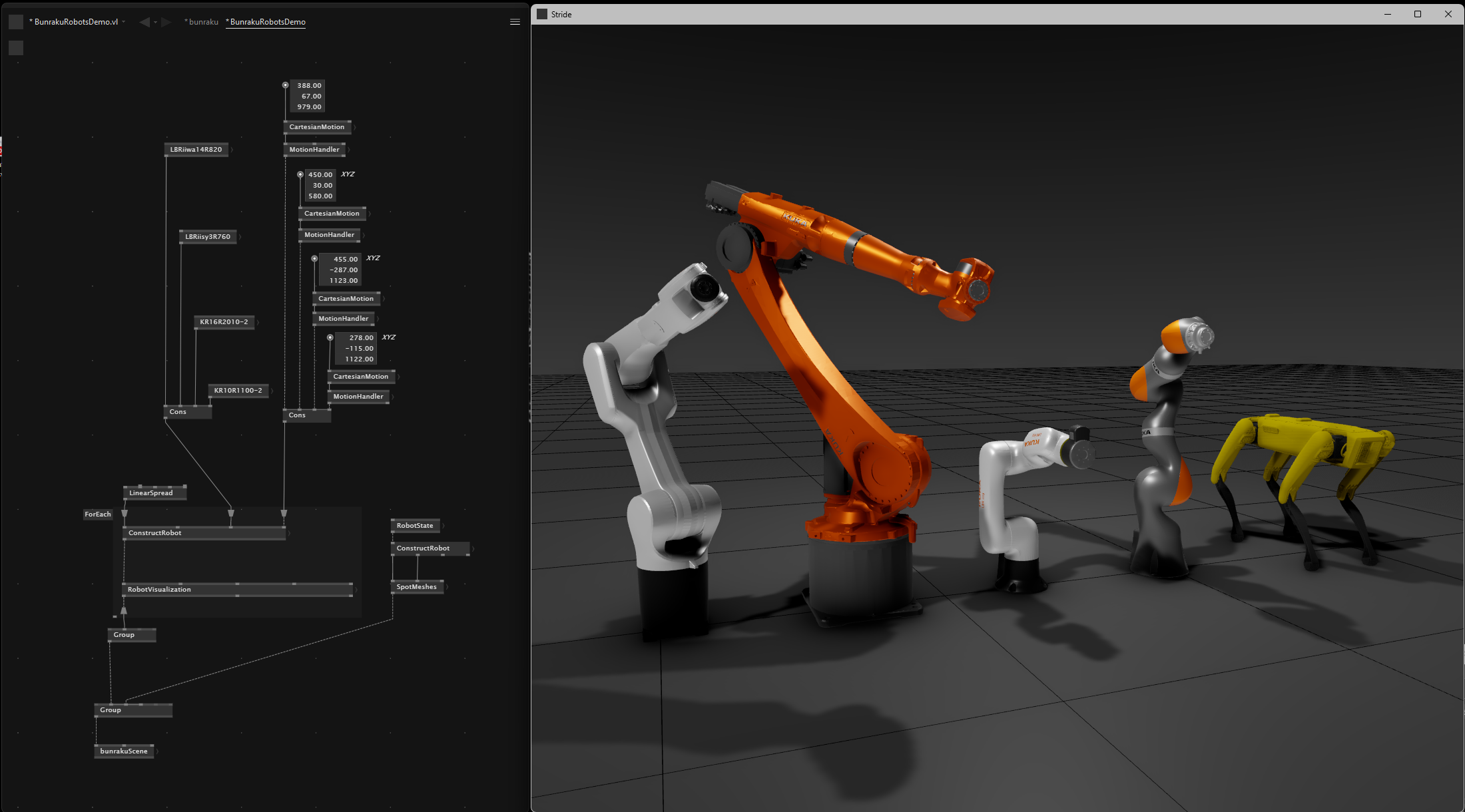
– Developed in VL, the visual programming language of vvvv gamma, supporting a flexible and modular workflow.
– Built on, and deeply inspired by KUKA|prc, while focusing on interactive and artistic performativity.
Core Characteristics
– Real-time remote collaboration, allowing multiple users to work within the same simulation environment.
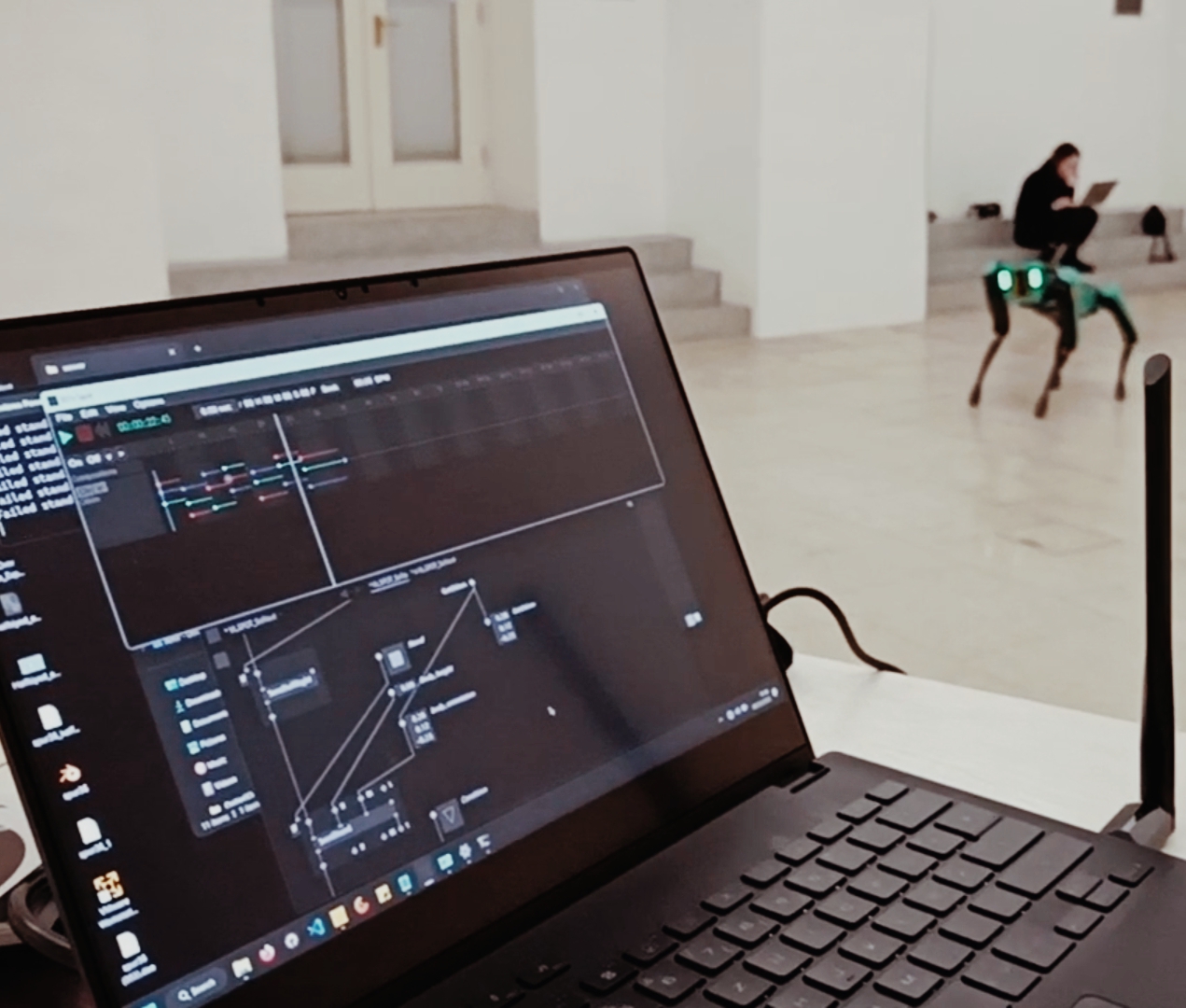
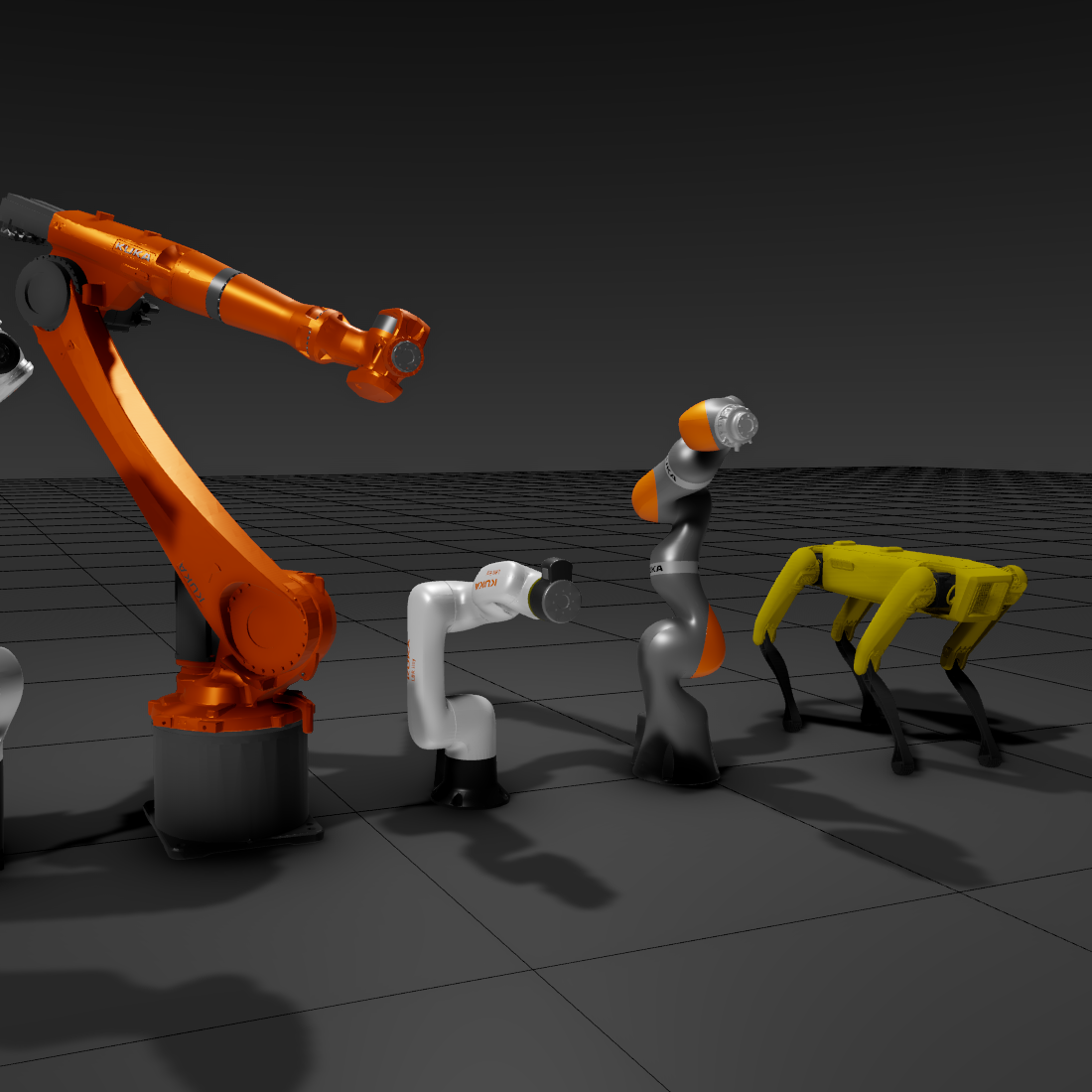
– Supports KUKA industrial robots and Boston Dynamics’ Spot, with potential for further expansion.
– Integrates with various communication protocols, making it adaptable to different workflows.
– Any input device that connects to a Windows PC, from game controllers to motion sensors, can influence robotic behaviour.
– Developed through direct engagement with artistic and interactive projects, shaping its evolving capabilities.
Current Status
Bunraku development is ongoing, shaped by practical use cases and evolving ideas about robotic agency, interaction, and performativity.
It is used in-house as an experimental tool and has contributed to the development of various robotic art installations and performances.
Such as:
ZOE – By Noor Stenfert Kroese & Amir Bastan
Doing Nothing With AI – By Emanuel Gollob
Contact – By Emanuel Gollob & Magdalena May
disarming – By Emanuel Gollob
disarmingII – By Emanuel Gollob