SplitSubject
SplitSubject is a Lacanian term in the notion of the Subject in Psychoanalysis. It is also known as a barred S “S” in Lacan’s four forms of discourse.
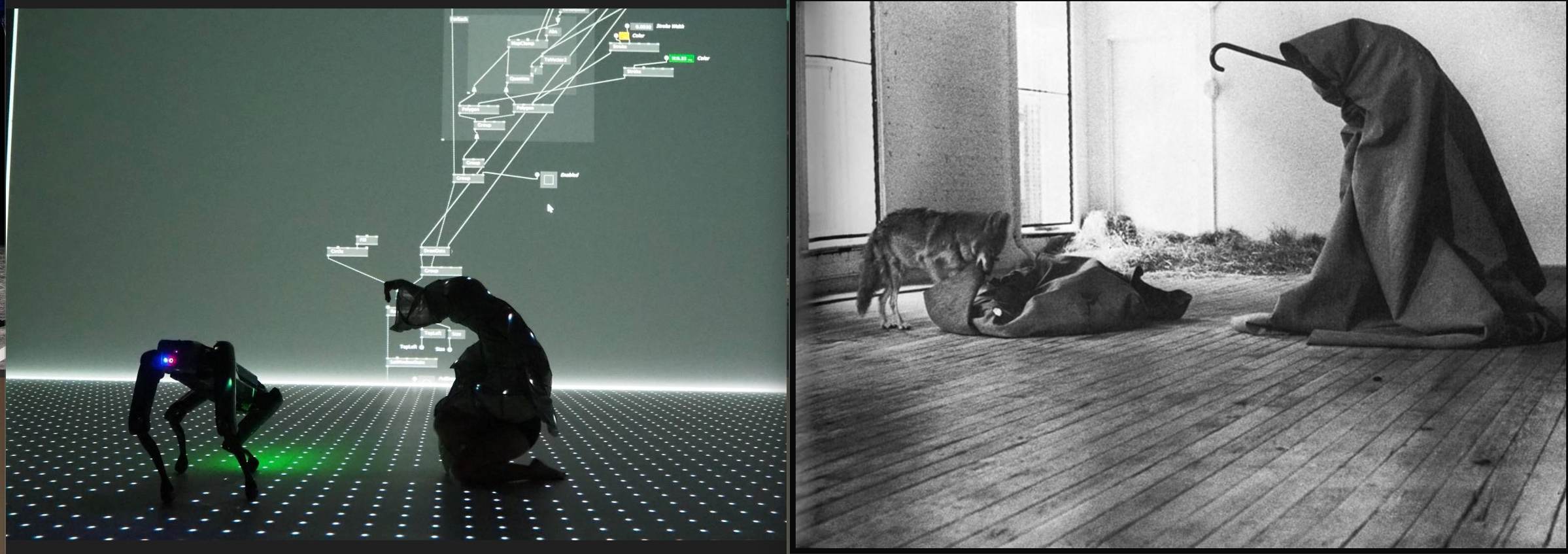
The core idea of the research originated in early 2021 when Amir Bastan had the opportunity to work with Spot, BostonDynamic’s quadruped robot, for an Interactive Installation. With generous support from Qapture GmbH and Creative Robotics, he embarked on developing a wrapper for Spot’s SDK in vvvv. Throughout the summer of 2021, several weeks were spent at the Linz OIC, where he worked closely on Spot in a dedicated room. The main goal was to create a utility to facilitate a compelling narrative that fostered meaningful interaction between the audience and the robot. During this process, Bastan found himself drawing inspiration from *Josef Beuys’* iconic performance piece, “I Like America and America likes me.”
Later that year, *Silke Grabinger* was proposed to join a collaborative project with *Creative Robotics*. The project aimed to combine the fields of performativity and robotics, and Grabinger was highly interested in the idea. Thus, the idea of the “SplitSubject” was initiated to explore ways of interactive performance in the context of human-robot interaction.
Returning to a situation where Beuys found himself trapped in a studio space with a wild coyote, viewing the narrative from an external perspective conveys a sense of uncertainty regarding the unknown factors surrounding the coyote. Although the animal is known or, better words, it is assumed to be called wild within a symbolic structure; the audience is left to wonder about the potential interaction between the artists and the coyote as a signifier to a narrative beyond the very performance as an event on its own.
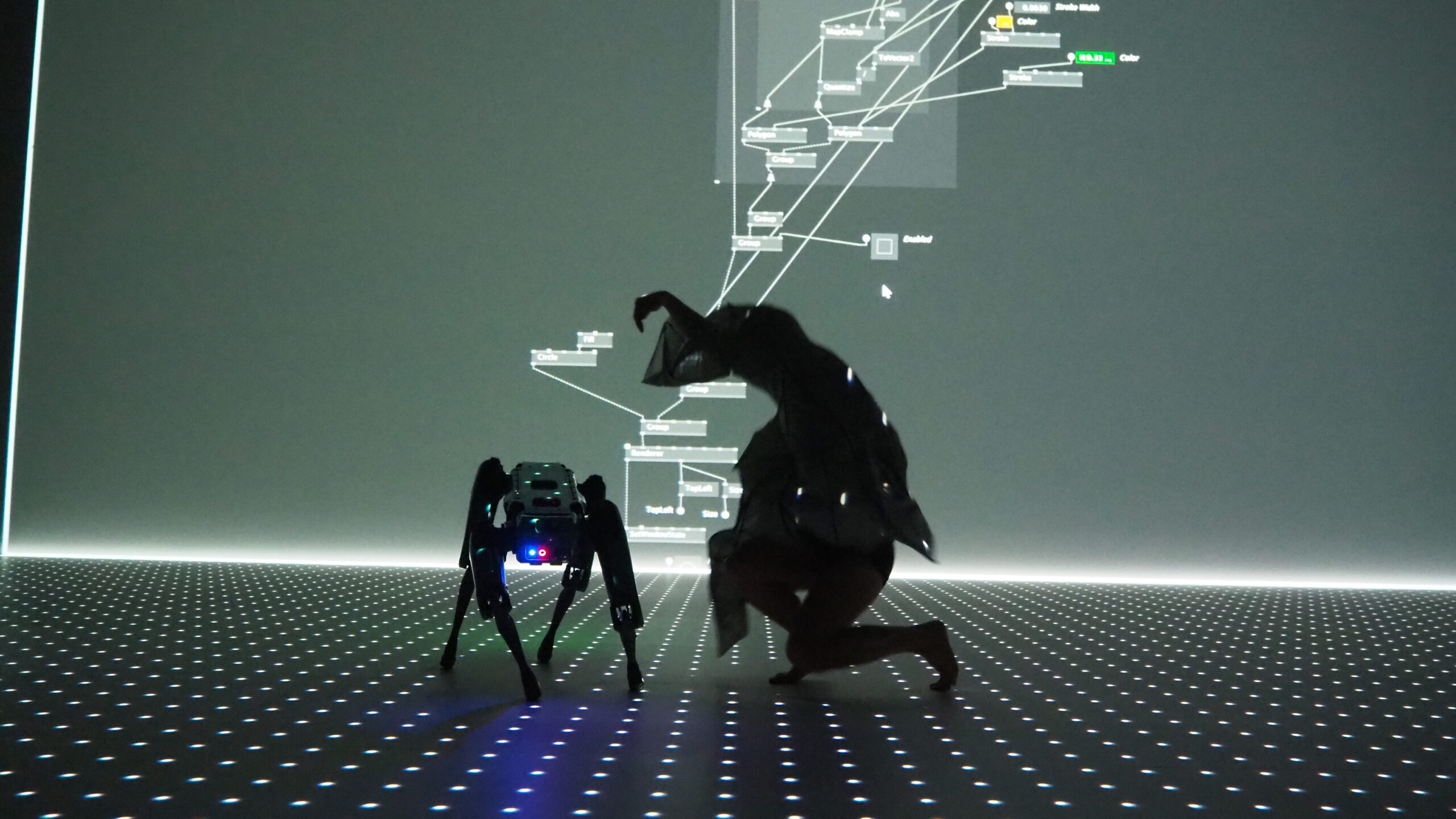
However, within the scope of Human-Robot Interaction, it may be assumed that the relationship between humans and robots would appear the opposite where both the human side and the software behind the robot are unsure of their own being and becoming. The SplitSubject performance is an attempt to reproduce a situation where both the performer and the robot are stuck between their current state and their evolution.
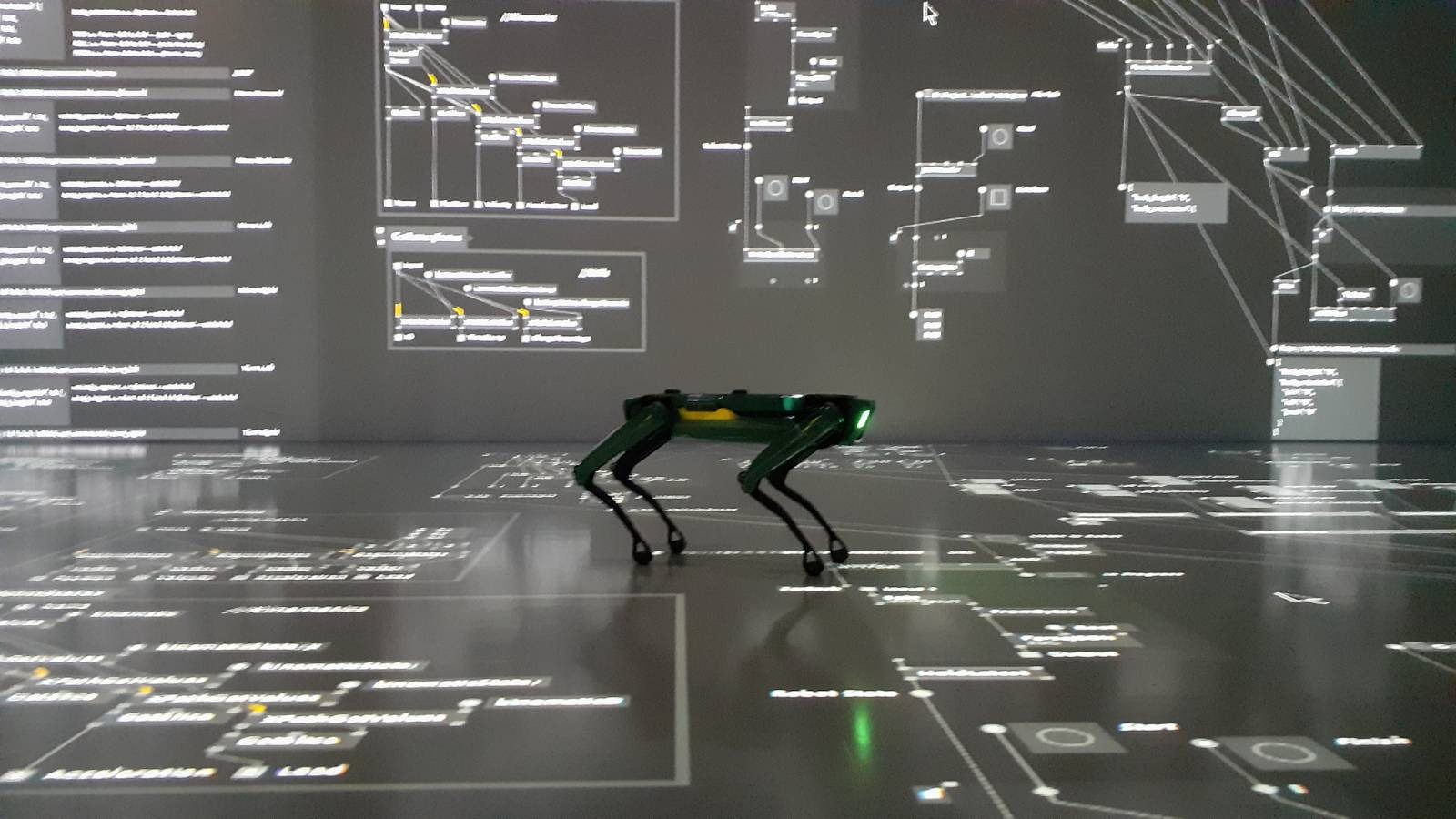
Custom-made software is written in vvvv and controls the robot in real-time; while the dancer is performing alongside the robot on stage, the robot’s movement is being recorded under the software’s hood. It passes several filters to extract the movement features. The accuracy of those features then becomes the transition trigger for a *Finite State Machine* which defines the behaviour of the robot during the performance.
By using the advantage of the robot’s real-time control, the robot’s operator could interfere with and manipulate the movement of the robot during the performance, using a game controller every now and then.