The Shell
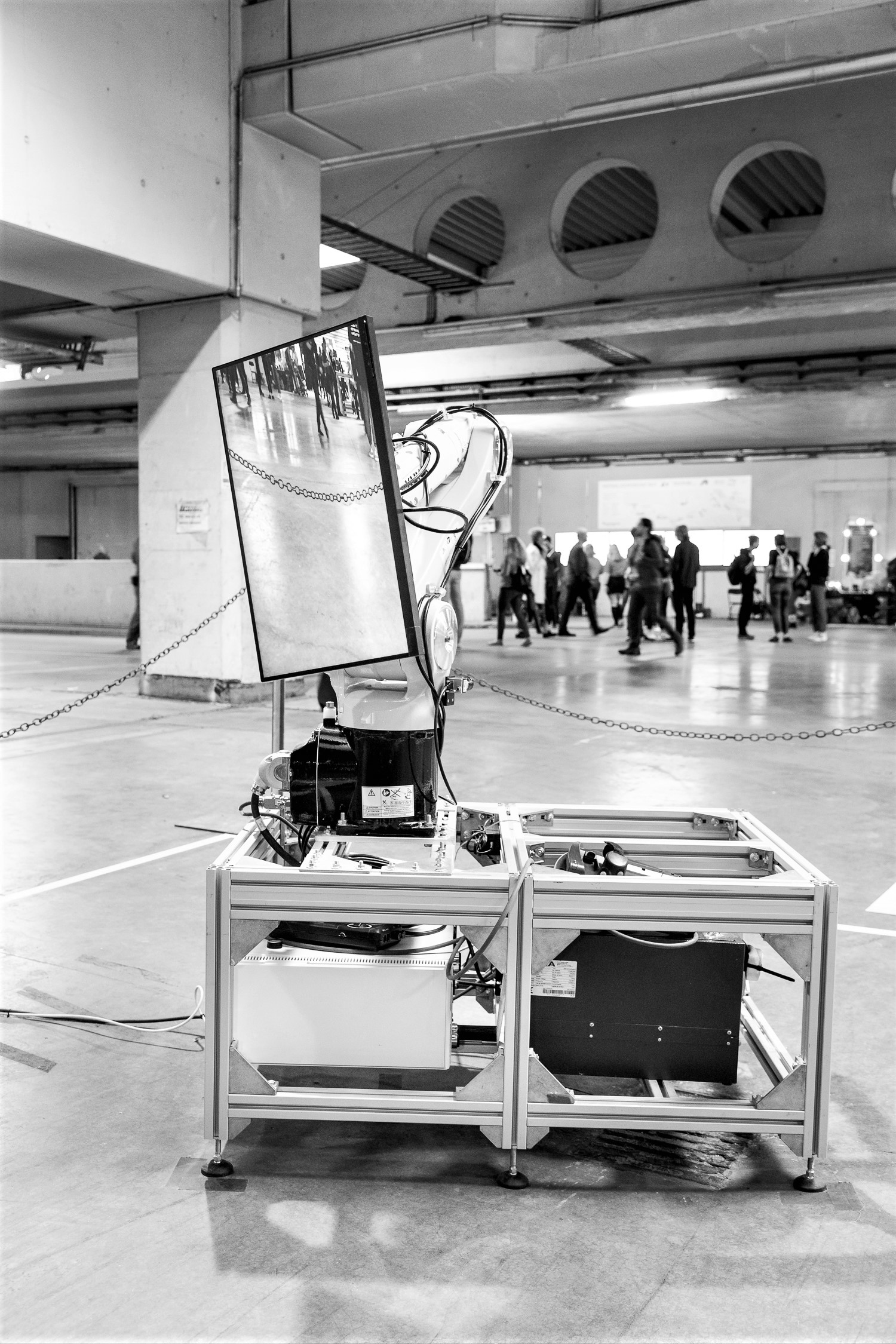
This is an installation featuring a robotic arm that carries a monitor. The arm has a camera attached to its first axis, which streams real-time images of the scenery behind it. These images are displayed on the monitor, making it appear like see-through glass. However, the images appear distorted due to a customised application that processes them based on the robot’s position and rotation. The robot’s movement is designed so that if someone stands directly in front of the monitor, they won’t see the robot as it appears to be hiding behind the screen. Observers can walk around the installation and witness situations where the screen is precisely between the robot and themselves.
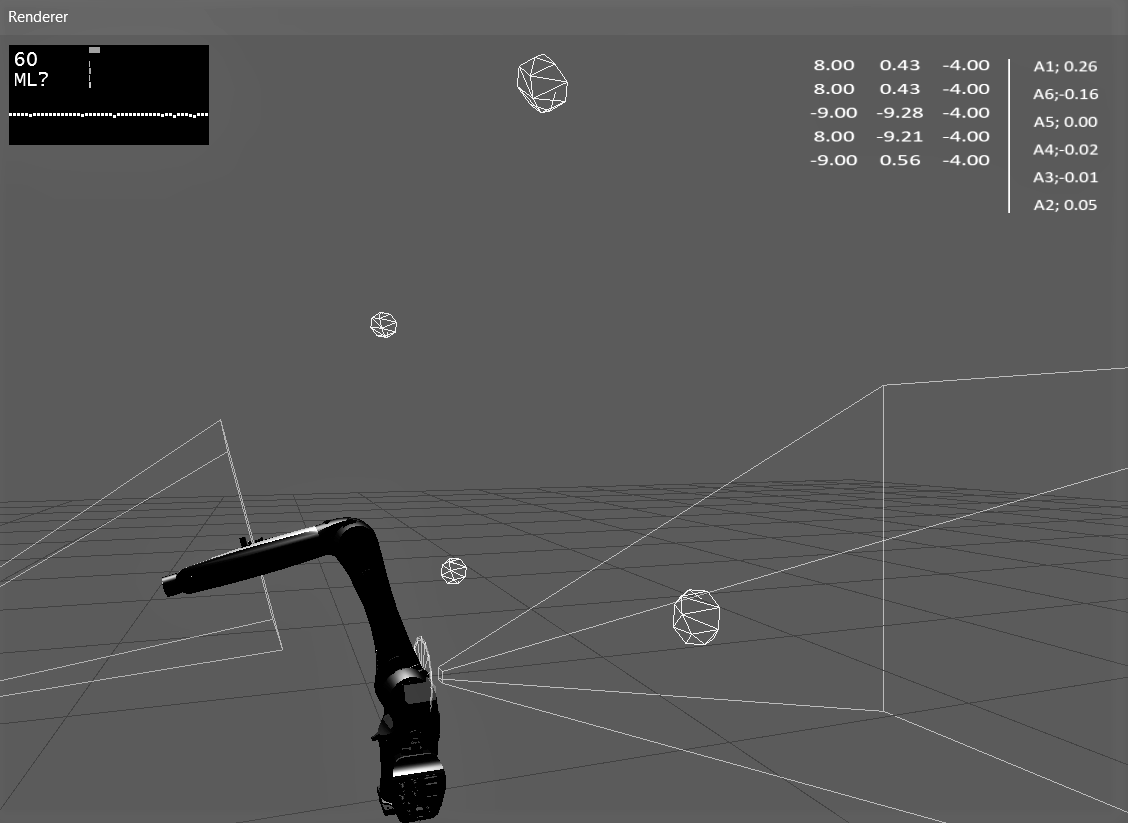
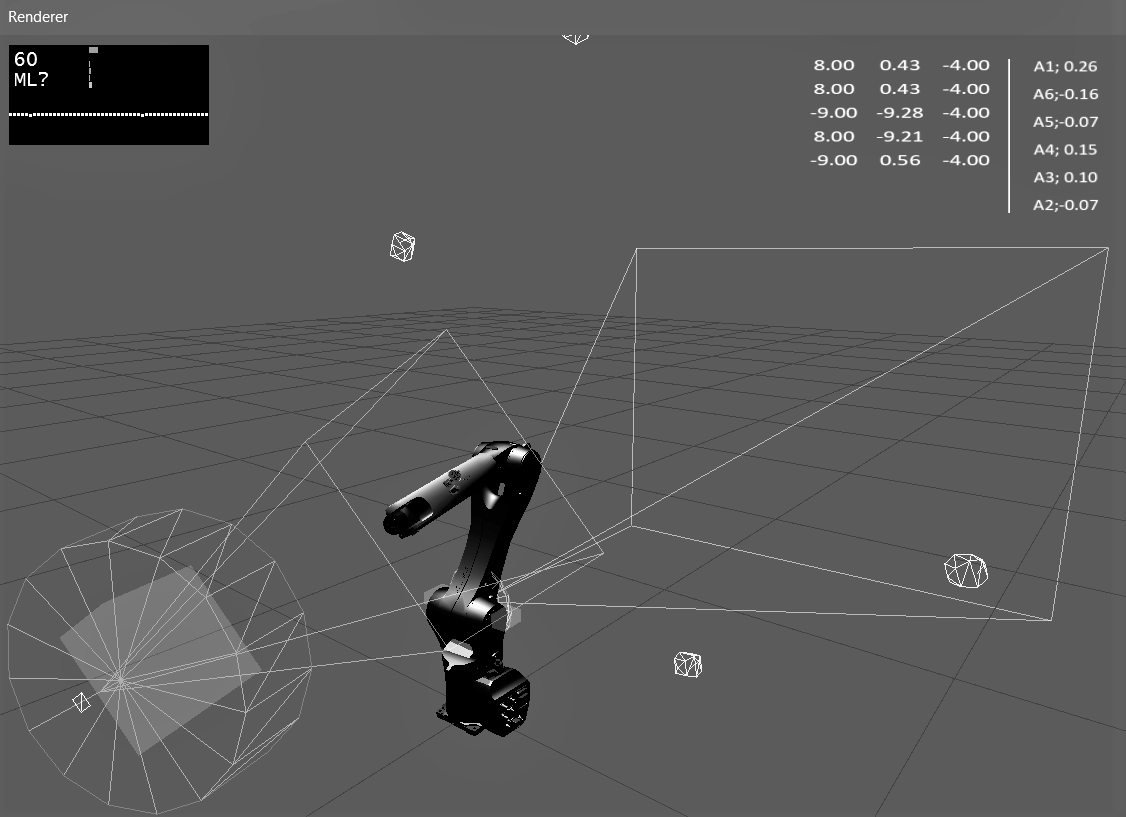
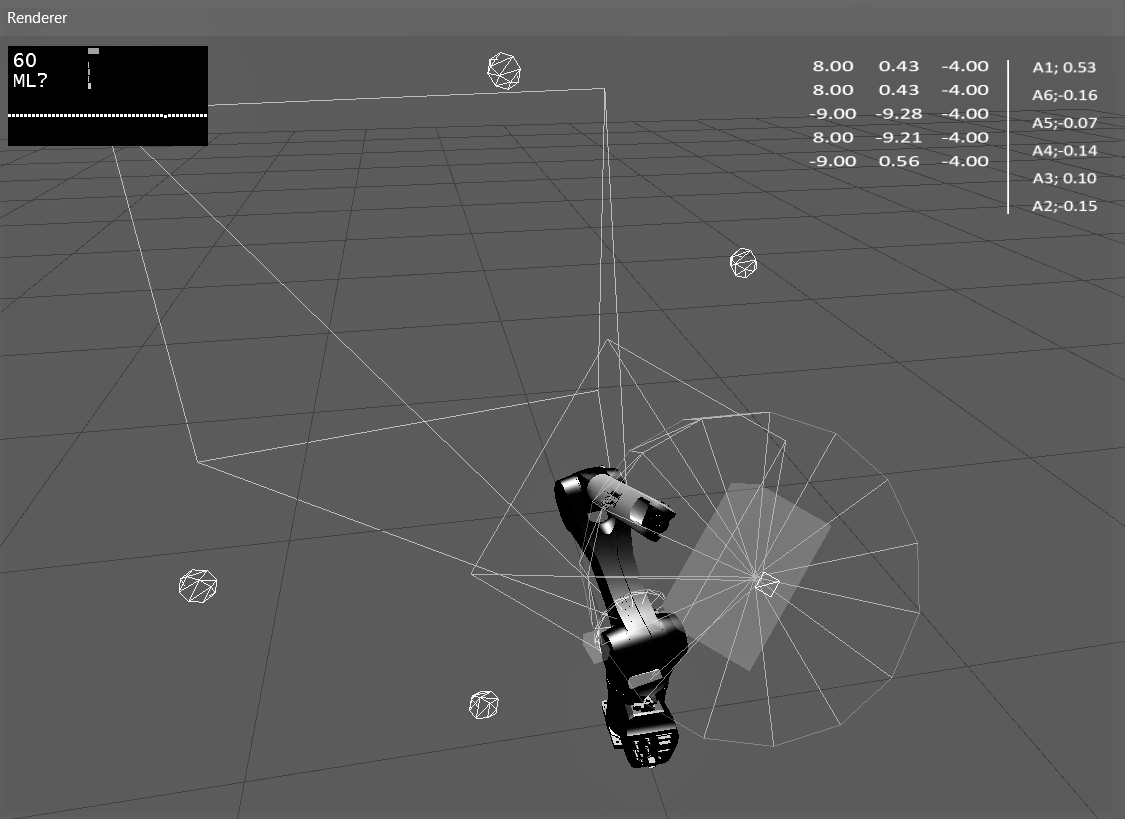
A high-speed camera captures the surroundings alongside the robot’s joint movements; this information feeds the software to analyse joint positions relative to the camera and creates a distorted live video due to 3D space differences.
This artwork explores transformation through external stimuli by mimicking “Motor Mimicry”, conveying understanding through reflexive actions.
In “The Shell”, robot behaviour is set to be perceived from both sides of a border, inviting audience curiosity and behaviour changes.
It is always fascinating not to talk about camouflage itself, but
its aspects; not questioning it ontologically but,
epistemologically.